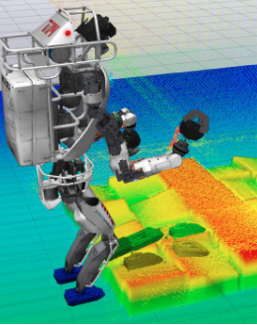
I am a research engineer at Boston Dynamics working on the Atlas humanoid robot. I specialize in our high-level motion planning and behavior execution stack, though I consider myself a generalist: I have tackled robotic control, perception, and simulation problems from a variety of angles, and have an eclectic toolbox spanning from bare-metal embedded electronics hacking to mixed-integer formulations of perception and inference problems (with a lot of neat stuff in between).
Here’s some cool stuff I’ve helped make happen!
Formerly, I was a graduate student with Russ Tedrake at the Robot Locomotion Group at MIT CSAIL, where my research broadly focused on the interplay of perception and simulation in robot manipulation.
In my spare time I work on robots and other engineering projects at home, fiddle with my 3D printer, do some photography (here’s my flickr!), learn to cook new and exciting things, and play too many video games.
Projects
Not all publications are listed here; these are just some recent highlights, including personal projects not reflected as publications. See below for my full list of publications.
Gregory Izatt and Russ Tedrake. Capturing Distributions over Worlds for Robotics with Spatial Scene Grammars.PhD Thesis. Final revisions pending. video
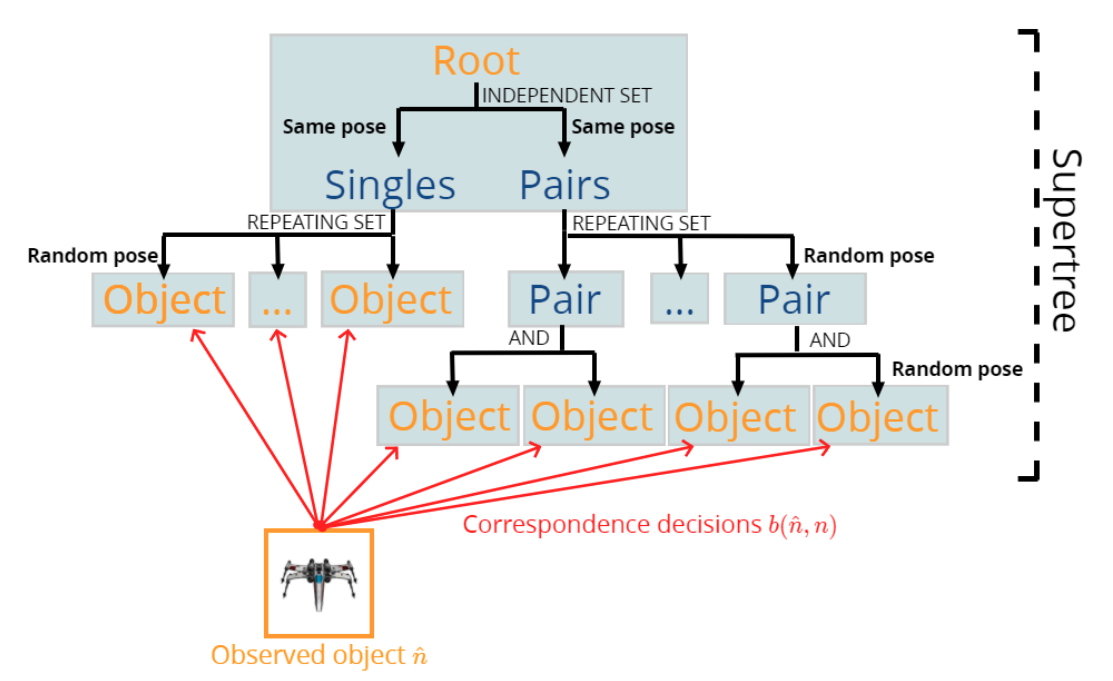
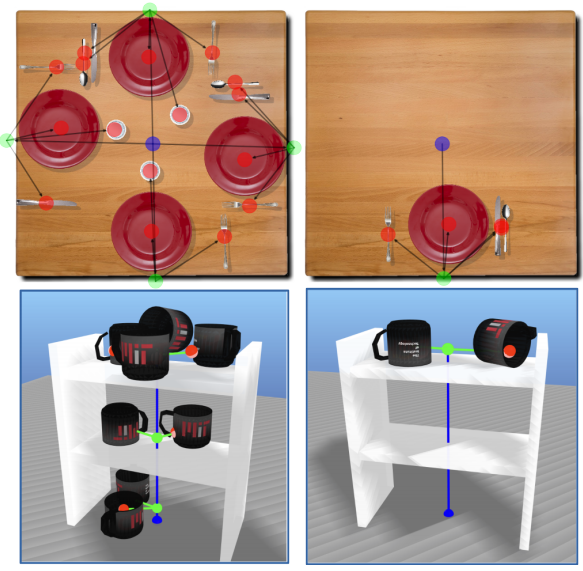
Gregory Izatt and Russ Tedrake. Scene Understanding and Distribution Modeling with Mixed-Integer Scene Parsing. In submission. pdf
Gregory Izatt and Russ Tedrake. Generative modeling of environments with scene grammars and variational inference. At ICRA 2020.pdfvideopresentation
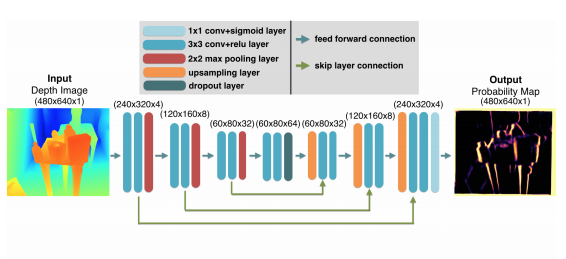
Chris Sweeney, Greg Izatt, and Russ Tedrake. A supervised approach to predicting noise in depth images. At ICRA 2019.pdfvideo
Gregory Izatt and Russ Tedrake. Robust object pose estimation with point clouds from vision and touch.Master’s thesis, MIT, Jun 2017. pdf
Hongkai Dai, Gregory Izatt, and Russ Tedrake. Global inverse kinematics via mixed-integer convex optimization. At ISRR 2017 and in IJRR 2020. pdf
Gregory Izatt, Hongkai Dai, Russ Tedrake. Globally Optimal Object Pose Estimation in Point Clouds with Mixed-Integer Programming. At ISRR 2017 and in IJRR 2020.pdf
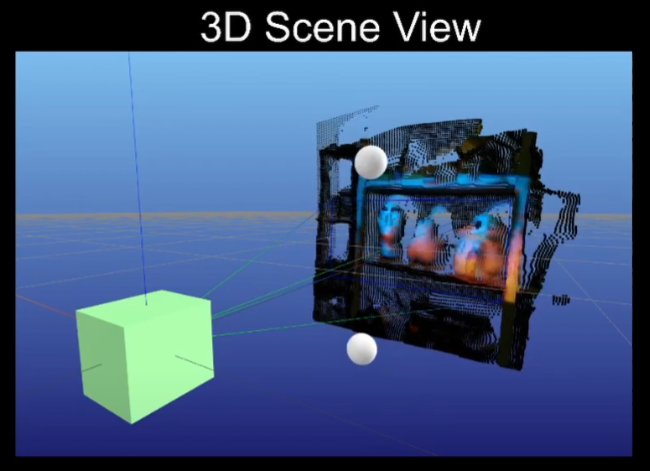
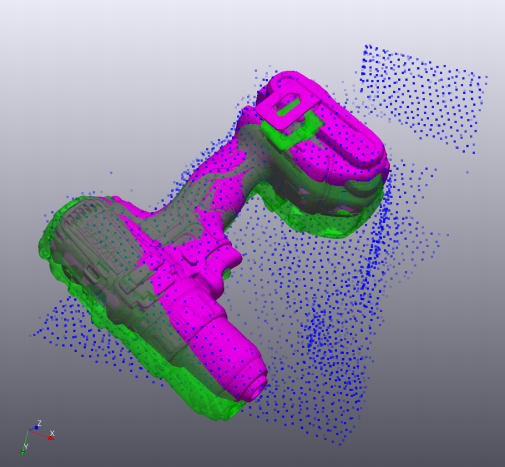
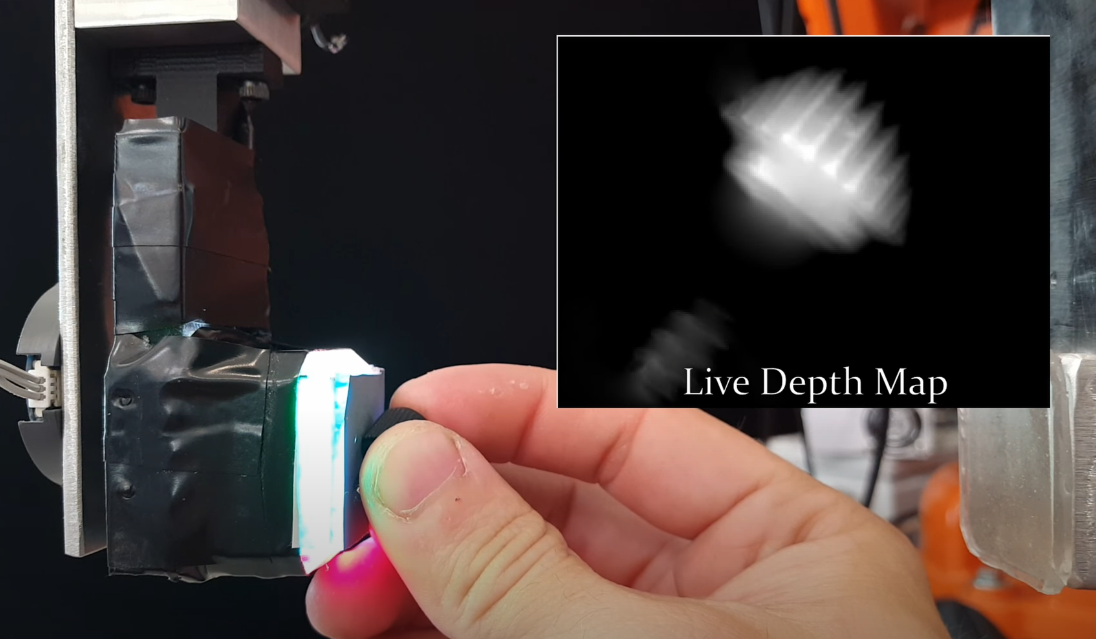
Gregory Izatt, Geronimo Mirano, Edward Adelson, Russ Tedrake. Tracking objects with point clouds from vision and touch. At ICRA 2017. pdfvideo
Pat Marion, Maurice Fallon, Robin Deits, Andrés Valenzuela, Claudia Pérez D’Arpino, Greg Izatt, Lucas Manuelli, Matt Antone, Hongkai Dai, Twan Koolen, John Carter, Scott Kuindersma, Russ Tedrake. Director: A user interface designed for robot operation with shared autonomy. In JFR 2017.pdf
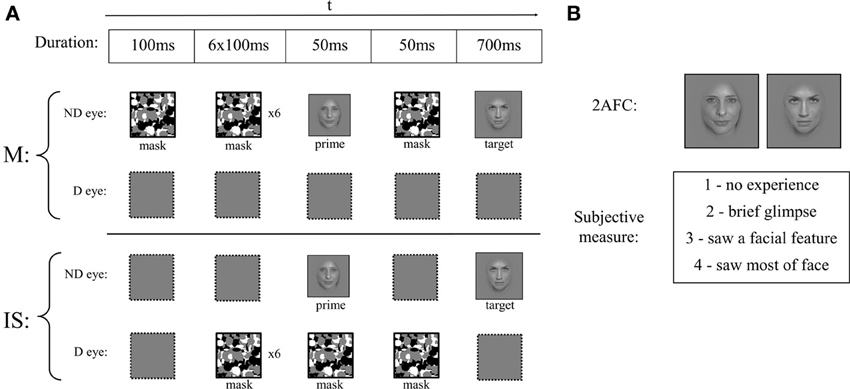
Gregory Izatt, Julien Dubois, Nathan Faivre, Christof Koch. A direct comparison of unconscious face processing under masking and interocular suppression. In Frontiers in psychology, 2014. html
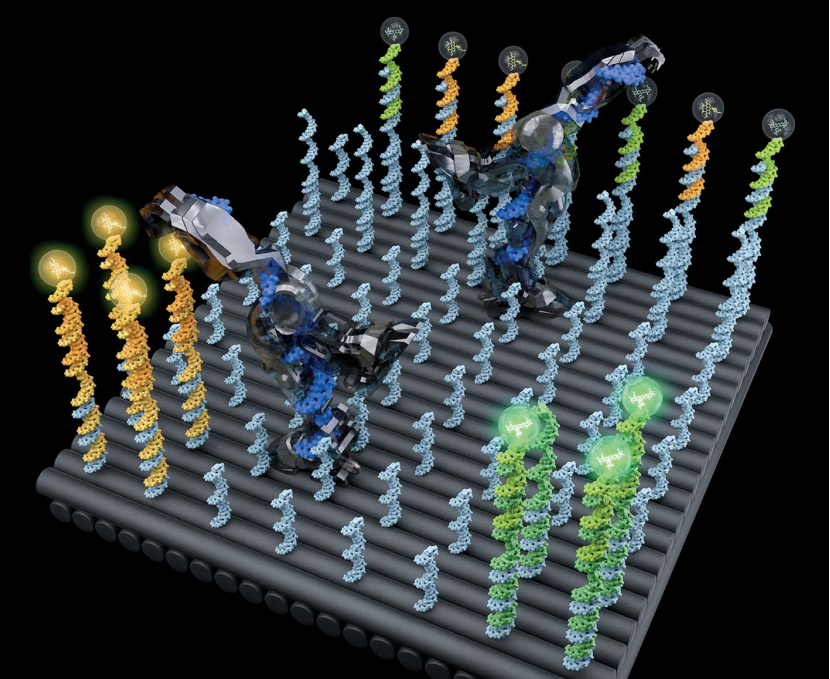
Anupama J Thubagere, Wei Li, Robert F Johnson, Zibo Chen, Shayan Doroudi, Yae Lim Lee, Gregory Izatt, Sarah Wittman, Niranjan Srinivas, Damien Woods, Erik Winfree, Lulu Qian. A cargo-sorting DNA robot. In Science, 2017. pdf