Dot
A tiny Spot.
github.com/gizatt/dot[WIP!]
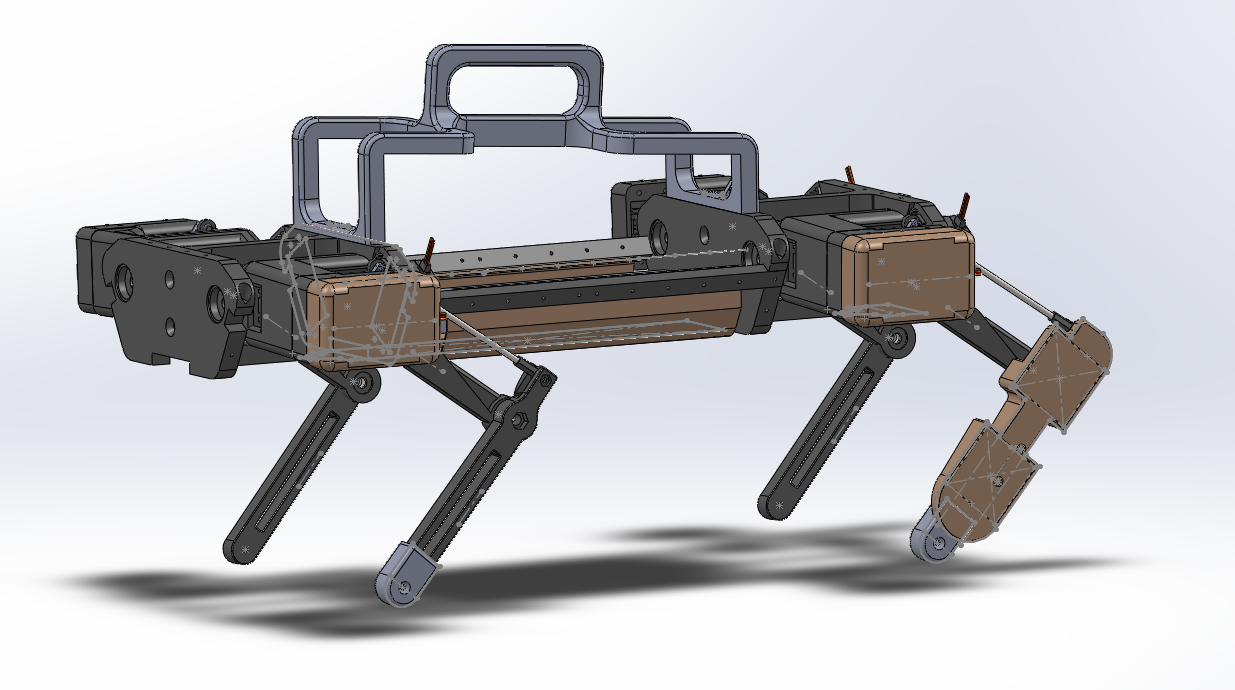
As a hobby project, I’m building a ~2kg, 3D-printed, servo-driven quadruped from scratch.
For this project, I’m specifically inspired by (and heavily referencing) a combination of SpotMicro and the Stanford Pupper. I love the SpotMicro aesthetic, but after printing and playing with a single leg, I found myself speed-limited in the knee by my hobby servos. The Stanford Pupper-style 4-bar knee linkage sidesteps this issue and decreases speed requirements for the knee joint; so I set out to copy that design in an entirely-3D-printed form.
(I’m super impressed by the likes of MJBots and OpenDog - but this project is intending to a smaller-scale, both in robot form factor and budget, spec’d for PWM-controlled, feedback-less hobby servos.